| |
О. Васильев, Д. Егоров, А. Кадыков
Цифровая обработка сигналов в системе радиомониторинга
В статье кратко рассматривается стратегия построения систем обнаружения коротких сигналов и реализация подобной системы с использованием прямой конвертации диапазона частот вниз и дальнейшей цифровой обработки квадратурных составляющих на DSP-контроллере Tornado E67.
При построении современных систем радиомониторинга и защиты информации весьма часто возникают задачи быстрого обнаружения и вычисления параметров коротких сигналов длительностью вплоть до нескольких микросекунд. Эти сигналы могут быть как одиночными, например, представлять собой кодированную команду управления, так и являться мгновенной выборкой из потока радиоимпульсов различной частоты. Такой поток может представлять собой канал передачи информации в какой-либо связной системе, соответствующей определённому стандарту связи, где для улучшения помехоустойчивости используется режим передачи со скачками по частоте (frequency hopping). Для режима FH характерна смена несущей частоты радиоимпульса по псевдослучайному закону с высокой скоростью, например, для стандарта Bluetooth она происходит 1600 раз в секунду в полосе 79 МГц. Соответственно, спектр одного импульса занимает полосу частот около 1 МГц.
Режим скачков по частоте используется для расширения спектра (FHSS - Frequency Hopping Spread Spectrum) в беспроводных компьютерных сетях для передачи данных по протоколу IEEE 802.11 и в различных радиосистемах военного применения.
Одним из наиболее характерных примеров является режим скачков FH в стандарте сотовой связи GSM, эффективно используемый для борьбы с замираниями сигнала, главным образом, при движении в автомобиле. Длительность радиоимпульса, или слота, в стандарте GSM равна 577 мкс, а длительность радиоимпульса при запросе связи абонентской трубкой как в случае исходящего, так и в случае входящего звонка составляет всего 300 мкс. Выход мобильного телефона в эфир с импульсом запроса (Random Burst) осуществляется на дуплексной частоте канала управления базовой станции. Весь последующий процесс обмена информацией между абонентским терминалом и базовой станцией может происходить уже в режиме скачков. Число используемых частотных каналов определяется базовой станцией.
Обнаружение короткого импульса в заданном диапазоне
Рассмотрим далее задачу обнаружения короткого радиоимпульса, в основном, применительно к системе сотовой телефонии стандарта GSM. Система, решающая задачу обнаружения короткого импульсного сигнала, может быть построена различными путями. Известно, что вероятность обнаружения сигнала зависит от отношения сигнал/шум, то есть от энергии сигнала и чувствительности приёмника. Важнейшим вопросом является согласование полос сигнала и приёмника. В идеале полоса пропускания приёмного устройства до детектора должна повторять форму огибающей спектра радиосигнала. Очевидно, что, если полоса пропускания приёмного устройства, или полоса фильтра измерительного устройства, работающего на широкополосном выходе промежуточной частоты приёмника, в несколько раз уже полосы радиоимпульса, то такой приёмник просто не прореагирует на воздействующий на его входе сигнал. Для правильного построения обнаружителя необходимы полные априорные данные о сигнале, включая несущую частоту. В рассматриваемой задаче с прыгающей по частоте несущей необходимо знание всех возможных частот, используемых для режима скачков. Для стандарта GSM это частотные каналы: 124 полнодуплексных канала в диапазоне 890–915 МГц (обратные каналы, абонентские терминалы – базовая станция) и 935–960 МГц (прямые каналы, базовая станция – абонентские терминалы), а также 374 канала в диапазоне 1710–1785 и 1805–1880 МГц. Разнос между каналами составляет 200 кГц. Реально, конечно, используется лишь некоторое количество каналов, на которых может работать базовая станция. Это может быть связано и с распределением сетки частот между различными операторами связи. Итак, будем считать, что все априорные данные нам известны, а задача сводится к энергетическому обнаружению сигнала на интервале времени и оценке его параметра - несущей частоты, или номера частотного канала в системе GSM.
Как следует из фундаментального соотношения [1], для расчёта чувствительности приёмника минимальная мощность обнаруживаемого сигнала растёт с ростом полосы анализа, или полосы пропускания приёмника:
Pmin = -174 dBm + NF + 10lgB + А, (1)
где NF - коэффициент шума приёмника;
В - полоса пропускания приёмника;
А - порог обнаружения, заданный в соответствии с выбранным критерием.
В том случае, когда сигнал представляет собой радиоимпульс в системе с режимом скачков по частоте (FH), или по n частотным каналам, при общей полосе обнаружения B = nF, где F - полоса частот, занимаемая одним каналом, минимальная мощность обнаруживаемого сигнала, как следует из выражения (1), увеличивается по сравнению с одноканальным обнаружителем на величину 10lgB/F = 10lgn дБ. Для системы сотовой связи стандарта GSM это 10lg124 = 20,9 дБ для нижнего, и 10lg374 = 25,7 дБ для верхнего диапазонов, соответственно.
Итак, широкополосный обнаружитель проигрывает в энергетике обнаруживаемого сигнала согласованному по полосе канала обнаружителю в приведённых примерах 20 децибелл и более. Однако, при достаточно мощном сигнале он гарантирует обнаружение сигнала, в то время как одноканальный обнаружитель в режиме сканирования по каналам имеет ничтожно малую вероятность обнаружения. Понятно, что для сохранения минимальной мощности обнаруживаемого сигнала и гарантированной вероятности его обнаружения (равной единице) необходим многоканальный обнаружитель, в котором число согласованных приёмников равно числу частотных каналов в системе, конкретно, 124 + 374 = 498 приёмников для системы GSM.
Спектральное оценивание в задаче обнаружения
Задачу многоканального обнаружения можно решить, применяя цифровые способы обработки сигналов. Классическим методом обнаружения сигнала является спектральное оценивание составляющих прямого преобразования Фурье для действующей на входе приёмника смеси сигнал + шум. Для получения спектральной оценки необходимо перевести сигнал в цифровую форму и вычислить его спектральное представление на цифровом процессоре (DSP), используя широкоизвестные алгоритмы, например, быстрое преобразование Фурье (FFT). Идеально, принятый сигнал должен быть оцифрован насколько возможно ближе к антенне, так как при этом цифровое представление сигнала будет иметь минимально возможные спектральные потери при дальнейшей цифровой обработке.
Классический путь фильтрации сигнала, то есть выделение узкополосного частотного канала из широкополосной смеси сигнала и шума, требует нескольких частотных преобразований через смесители и соответствующие аналоговые фильтры, пока не будет достигнута требуемая точность, или качество, в разделении каналов. Система цифровой обработки сигнала (ЦОС) обычно использует сигнал, снимаемый с широкополосного выхода промежуточной частоты приёмника, значения которой обычно выбирают из стандартного набора: 10,7, 21,4 МГц и так далее. Иногда используют дополнительное преобразование вниз с целью использования более низкочастотных, но имеющих большее число разрядов и, соответственно, больший динамический диапазон АЦП. Частота оцифровки сигнала выбирается в 2–3 раза выше верхней граничной частоты полосы пропускания тракта ПЧ приёмника.
Бурное развитие цифровых технологий и появление бысродействующих АЦП с тактовыми частотами до ГГц и выше в последнее время породило тенденцию всё большего смещения систем цифровой обработки сигнала (ЦОС) в сторону антенны. При стандартной динамике приёмника по выходу ПЧ 60–70 дБ для осуществления цифровой обработки без существенных потерь достаточно использования 12-разрядного АЦП, имеющего собственный динамический диапазон 72 дБ. Подобные АЦП с частотой выборки 65 и 105 МГц производит, например, компания Analog Devices.
Кроме того, расширить частотный диапазон анализируемых сигналов приблизительно до значения частоты выборки АЦП можно используя современные методы разложения входного сигнала на квадратуры. Практически все цифровые демодуляторы и системы цифровой обработки сигналов в сотовой телефонии, беспроводных компьютерных сетях и так далее работают по такому принципу. В последнее время на рынке интегральных микросхем для обработки высокочастотных аналоговых сигналов появились и прямые конверторы вниз (DDC - Direct Downconverter), позволяющие получать на выходе синфазную и кватратурную составляющие преобразованного входного сигнала в частотном диапазоне практически до 100 МГц. Далее синфазная и квадратурная составляющие поступают на два синхронно работающие АЦП, выборка сохраняется в буферной памяти и затем передаётся в DSP для вычисления спектра.
Реализация системы
Описанный выше принцип использовался разработчиками для решения задачи построения системы радиомониторинга диапазонов всех действующих в России стандартов сотовой связи и беспроводного доступа. В качестве примера рассмотрим конкретный приёмный тракт, предназначенный для мониторинга в реальном времени прямых, или обратных каналов радиолинии сотовой связи стандарта GSM, в частности, для контроля выхода в эфир и определения несущих частот абонентских аппаратов. Суммарный диапазон частот в этом стандарте составляет 100 МГц. Для его контроля используются 4 линейных приёмника с полосой пропускания 25 МГц каждый, построенные по принципу прямой конвертации сигналов вниз с разложением на квадратурные составляющие и автономная система ЦОС. Блок-схема линейного приёмника приведена на рис. 1. Входной сигнал через коммутатор, переключающий прямые и обратные каналы, поступает далее на прямой конвертор вниз (DDC), выполненный на микросхеме MAX2105. Гетеродин содержит ГУН и синтезатор частоты, управляемый системой ЦОС через микроконтроллер по шине RS-232. Система ЦОС управляет усилением конвертора в диапазоне до 46 дБ. Поскольку частота гетеродина выбрана равной ценральной частоте диапазона и используется квадратурная обработка, полосы пропускания фильтров низкой частоты выбраны равными половине ширины диапазона, то есть 12,5 МГц. Квадратурные сигналы с конвертора после фильтрации фильтром низкой частоты поступают на систему ЦОС.
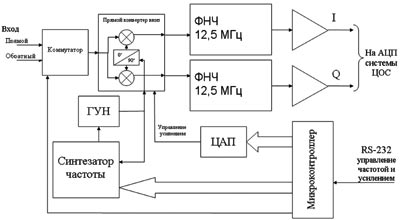
Рисунок 1. Блок-схема квадратурного приёмника (стандарт GSM)
Автономная система ЦОС, выполняющая функции цифрового обнаружителя-анализатора, построена на базе автономного DSP-контроллера типа TORNADO-E67 фирмы MicroLab Systems Ltd (www.mlabsys.com), на котором установлена плата дочернего модуля высокоскоростного АЦП/ЦАП с параллельным интерфейсом AD/DA PIOX DCM, как показано на рис. 2. Контроллер с дочерней платой имеет на входе два 12-разрядных параллельных синхронных АЦП с максимальной скоростью тактирования 65 МГц. Тактирующий генератор установлен на плате. Таким образом дочерний модуль позволяет оцифровывать два входных сигнала в полосе до ~ 30 МГц и передавать данные, накопленные в буферной памяти FIFO объёмом 256 К через параллельный 16-разрядный интерфейс PIOX-16 I/F на материнскую плату DSP контроллера для сигнальной обработки. Помимо этого, на входе дочерний модуль содержит два статических 4-разрядных мультиплексора MUX перед АЦП, что позволяет организовать 4 канала квадратурного аналого-цифрового преобразования, последовательно осуществляющих скоростную выборку для расчёта спектра по алгоритмам БПФ.
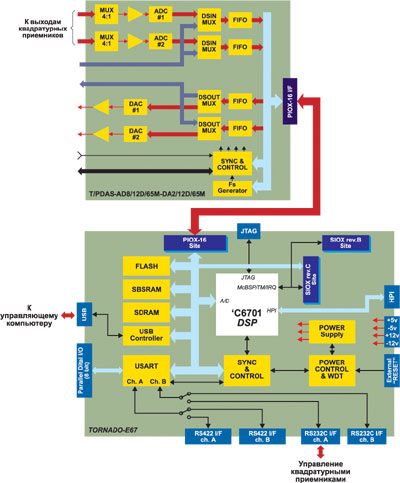
Рисунок 2
Основным ядром контроллера TORNADO-E67 является цифровой сигнальный процессор (DSP) TMS 320C6701 (32 бита, плавающая запятая 1000 MFLOPS) фирмы Texas Instruments, чья архитектура оптимизирована под параллельные вычисления. На плате установлена микросхема высокоскоростной синхронной пакетной (burst) SRAM (SBARAM), синхронной SDRAM и флэш-памяти FLASH. На плате имеется двухканальный универсальный синхронно/асинхронный приёмопередатчик USART (10 Мбит/с) с двумя двухканальными интерфейсами RS422 I/F (10 Мбит/с) и RS232 (115 Мбит/с), а также USB контроллер, для подключения по шине USB управляющего компьютера. Плата содержит параллельный интерфейс PIOX-16 для подключения дочернего модуля, последовательный интерфейс SIOX для управления внешними устройствами и порт JTAG для подключения эмуляторов. Для обработки данных и расчёта комплексного спектра 2 по 1024 точек по алгоритму FFT контроллеру требуется время не более 17 мкс. Отладка аппаратно-программных средств с помощью скан-эмуляторов TI XDS510 и MicroLAB Systems MIRAG-5100 осуществлялась при поддержке интегрированной среды разработки ПО Code Composer Studio IDE фирмы TI.
Система ЦОС выполняет как функции дискретного спектрального анализа, так и функции управления приёмниками и всей системой в целом. Один DSP-контроллер полностью обеспечивает обнаружение и анализ сигналов сотовой системы стандарта GSM в реальном времени. Система может работать в полностью автономном режиме, либо с выводом данных на управляющий компьютер через шину USB. Загрузка программ для DSP и параметров системы производится также через USB-порт. Анализ в реальном времени сотовой сети стандарта GSM требует наибольших вычислительных ресурсов. Так, аналогичный DSP-контроллер способен одновременно обрабатывать сигналы сотовой телефонии стандартов AMPS/DAMPS, CDMA, NMT-450 и беспроводного доступа DECT.
Работа такой аппаратуры в реальном времени позволяет решать множество задач, например, автоматизированный контроль зоны покрытия сотовых систем, обнаружение несанкционированных источников (абонентских станций) и их пеленгация и так далее. Принципы построения подобных систем используются и для реализации поисковой техники в современных системах защиты информации, а также при разработке антитеррористической техники.
|